

Brief Matrix Algebra Review
Matrix algebra is a form of mathematics that allows
compact notation for, and mathematical
manipulation of, high-dimensional expressions and equations. For the purposes of
this
class, only a relatively simple exposition is required, in order to understand
the notation for
multivariate equations and calculations.
1 Matrix Notation
The basic unit in matrix algebra is a matrix, generally
expressed as:
 (1)
(1)
Here, the matrix A is denoted as a matrix by the boldfaced type. Matrices
are also
often denoted using bold-faced type. Matrices can be of any dimension; in this
example,
the matrix is a '3-by-3'or '3 × 3'matrix. The number of
rows is listed first; the number of
columns is listed second. The subscripts of the matrix elements (a's) clarify
this: the 3rd
item in the second row is element a23. A matrix with only one element
(i.e., 1 × 1 dimension)
is called a scalar. A matrix with only a single column is called a column
vector; a matrix
with only a single row is called a row vector. The term 'vector' also has
meaning in analytic
geometry, referring to a line segment that originates at the origin (0, 0, . . .
0) and terminates
at the coordinates listed in the k dimensions. For example, you are already
familiar with the
Cartesian coordinate (4, 5), which is located 4 units from 0 in the x dimension
and 5 units
from 0 in the y dimension. The vector [4, 5], then, is the line segment formed
by taking a
straight line from (0, 0) to (4, 5).
2 Matrix Operations
The first important operation that can be performed on a
matrix (or vector) is the transpose
function, denoted as: A' or AT. The transpose function reverses the
rows and columns of a
matrix so that:
 (2)
(2)
This equation says that the i, j−th element of the
transposed matrix is the j, i−th element
of the original element for all i = 1 . . . I and j = 1 . . . J elements. The
dimensionality of a
transposed matrix, therefore, is the opposite of the original matrix. For
example, if matrix
B is 3 × 2, then matrix BT will be of
dimension 2 × 3.
With this basic function developed, we can now discuss
other matrix functions, including
matrix addition, subtraction, and multiplication (including division). Matrix
addition and
subtraction are simple. Provided two matrices have the same dimensionality, the
addition
or subtraction of two matrices proceeds by simply adding and subtracting
corresponding
elements in the two matrices:
 (3)
(3)
The commutative property of addition and subtraction that
holds in scalar algebra also
holds in matrix algebra: the order of addition or subtraction of matrices makes
no difference
to the outcome, so that A + B + C = C + B + A.
Matrix multiplication is slightly more difficult than
addition and subtraction, unless one
is multiplying a matrix by a scalar. In that case, the scalar is distributed to
each element in
the matrix, and multiplication is carried out element by element:
 (4)
(4)
In the event two matrices are being multiplied, before
multiplying, one must make sure
the matrices 'conform' for multiplication. This means that the number of columns
in the
first matrix must equal the number of rows in the second matrix. For example,
one can not
post-multiply a 2 × 3 matrix A by another 2
× 3 matrix B , because the number of columns
in A is 3, while the number of rows in B is 2. One could however multiply
A by a 3 × 2
matrix C. The matrix that results from multiplying A and C
would have dimension 2 × 2
(same number of rows as the first matrix; same number of columns as the second
matrix).
The general rule for matrix multiplication is as follows: if one is multiplying
A × C = D,
then:
 (5)
(5)
This says that the ij −th element of matrix D
is equal to the sum of the multiple of the
elements in row i of A and the column j of C . Matrix
multiplication is thus a fairly tedious
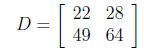
process. As an example, assume A is 2 ×3 and C
is 3 ×2, with the following elements:
 (6)
(6)
Then, element d11 = (1 × 1) + (2
× 3) + (3 × 5) = 22, and the
entire D
matrix is (solve
this yourself):
 (7)
(7)
Notice that D is 2 × 2.
Unlike matrix addition and subtraction, in which order of
the matrices is irrelevant, order
matters for multiplication. Obviously, given the conformability requirement,
reversing the
order of matrices may make multiplication impossible (e.g., while a 3
× 2 matrix can be
post-multiplied by a 2 × 4 matrix, the 2
× 4 matrix can NOT be post-multiplied by the 3 × 2
matrix). However, even if matrices are conformable for multiplication after
reversing their
order, the resulting matrices will not generally be identical. For example, a 1
× k row vector
multiplied by a k × 1 column vector will yield a scalar
(1?), but if we reverse the order of
multiplication, we will obtain a k × k matrix.
Some additional functions that apply to matrices and are
commonly seen include the
trace operator (the trace of A is denoted TrA), the determinant,
and the inverse. The trace
of a matrix is simply the sum of the diagonal elements of the matrix. The
determinant is
more difficult. Technically, the determinant is the sum of the signed multiples
of all the
permutations of a matrix, where 'permutations' refer to the unique combinations
of a single
element from each row and column, for all rows and columns. If d denotes the
dimensionality
of a matrix, then there are d! permutations for the matrix. For instance, in a 3
× 3 matrix,
there are a total of 6 permutations (3! = 3 × 2
×1 = 6): (a11, a22, a33),
(a12, a23, a31), (a13,
a21, a32), (a13, a22, a31),
(a11, a23, a32), (a12, a21,
a33). Notice how for each combination, there
is one element from each row and column. The signing of each permutation is
determined
by the column position of each element in all the pairs that can be constructed
using the
elements of the permutation, and the subscript of element at each position in
each pair.
For example, the permutation (a11, a22, a33)
has elements from columns 1,2, and 3. The
possible ordered (i, j) pairs that can come from this permutation include (1,
2), (1, 3), and
(2, 3) (based on the column position). If there are an even number of (i, j)
pairs in which
i > j, then the permutation is considered even and takes a positive sign;
otherwise, the
permutation is considered odd and takes a negative sign. In this example, there
are 0 pairs
in which i > j, so the permutation is even (0 is even). However, in the
permutation (a13,
a22, a31), the pairs are (3, 2), (3, 1), and (2, 1). In
this set, all three pairs are such that i > j,
hence this permutation is odd and takes a negative sign. The determinant is
denoted using
absolute value bars on either side of the matrix name: for instance, the
determinant of A is
denoted as |A|.
For 2 × 2 and 3 ×
3 matrices, determinants can be calculated fairly easily; however, for
larger matrices, the number of permutations becomes large rapidly. Fortunately,
several
rules simplify the process. First, if any row or column in a matrix is a vector
of 0, then the
determinant is 0. In that case, the matrix is said not to be 'of full rank'.
Second, the same
is true if any two rows or columns is identical. Third, for a diagonal matrix
(i.e., there are
0s everywhere but the main diagonal-the 11, 22, 33,... positions), the
determinant is only
the multiple of the diagonal elements. There are additional rules, but they are
not necessary
for this brief introduction. We will note that the determinant is essentially a
measure of the
area/volume/hypervolume bounded by the vectors of the matrix. This helps, we
think, to
clarify why matrices with 0 vectors in them have determinant 0: just as in two
dimensions
a line has no area, when we have a 0 vector in a matrix, the dimensionality of
the figure
bounded by the matrix is reduced by a dimension (because one vector doesn't pass
the
origin), and hence the hypervolume is necessarily 0.
Finally, a very important function for matrix algebra is
the inverse function. The inverse
function allows the matrix equivalent of division. In a sense, just as 5 times
its inverse
1/5 = 1, a matrix A times its inverse-denoted A-1-equals I, where I
is the 'identity
matrix'. A
n identity matrix is a diagonal matrix with ones along the
diagonal. It is the matrix
equivalent of unity (1). Some simple algebraic rules follow from the discussion
of inverses
and the identity matrix:
AA-1 = A-1A = I (8)
Furthermore,
AI = IA = A (9)
Given the commutability implicit in the above rules, it
stands that inverses only exist
for square matrices, and that all identity matrices are square matrices. For
that matter, the
determinant function can only apply to square matrices also.
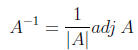
Computing the inverse of matrices is a difficult task, and
there are several methods by
which to derive them. Probably the simplest method to compute an inverse is to
use the
following formula:
 (10)
(10)
The only new element in this formula is the adj A , which
means 'adjoint of A
.' The
adjoint of a matrix is the transpose of its matrix of cofactors, where a
cofactor is the signed
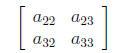
determinant of the 'minor' of an element of a matrix. The minor of element i, j
can be found
by deleting the ith row and jth column of the matrix. For example,
the minor of element
a11 of the matrix A above is:
 (11)
(11)
Taking its determinant leaves one with a scalar that is
then signed (by multiplying by
−1i+j). In this case, we obtain (−1)2(a22a33
−a23a32) as the cofactor for element a11. If
one
replaces every element in matrix A with its signed cofactor, then
transposes the result, one
will obtain the adjoint of A . Multiplying this by 1/|A| (a scalar) will
yield the inverse of
A .
There are a number of important properties of cofactors that enable more rapid
computation
of determinants, but discussing these is beyond the scope of this simple
introduction.
Fortunately, computer packages tend to have determinant
and inversion routines built
into them, and there are plenty of inversion algorithms available if you are
designing your
own software, so that we generally need not worry. It is worth mentioning that
if a matrix
has a 0 determinant, it does not have an inverse. There are many additional
matrix algebra
rules and tricks that one may need to know; however, they are also beyond the
scope of this
introduction.
3 The OLS Regression Solution in Matrix Form
We close this section by demonstrating the utility of
matrix algebra in a statistical problem:
the OLS regression solution.
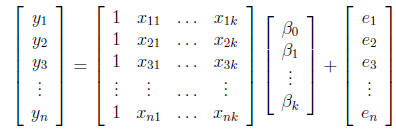
When dealing with the OLS regression problem, we
can think of the entire data set in
matrix terms:
 (12)
(12)
In this problem, there are n individuals in the dataset measured on one
dependent (outcome)
variable y, with k regressor (predictor) variables x, and hence k coefficients
to be
estimated. The column of ones represents the intercept. If one performs the
matrix algebra
(multiplication) for the first observation, y1, one can see that:
 (13)
(13)
which is exactly as it should be: the dependent variable
for observation 1 is a linear
combination of the individual's values on the regressors weighted by the
regression coefficients,
plus an individual-specific error term. This equation can be written more
succinctly
by simply writing:
 (14)
(14)
How can we solve for  ? Just as in scalar algebra, we need
to isolate
? Just as in scalar algebra, we need
to isolate  . Unlike scalar
. Unlike scalar
algebra, however, we can't simply subtract the error term from both sides and
divide by X,
because a) there is no matrix division, really, and b) multiplication must
conform. So, we
first multiply both sides by 
 (15)
(15)
We multiply by the transpose of X here, because X-1Y
would not conform for multiplication.
One of the assumptions of OLS regression says that X and e are
uncorrelated, hence
 Thus, we are left with:
Thus, we are left with:
 (16)
(16)
From here, we need to eliminate
 from the right side of the equation. We can
do
from the right side of the equation. We can
do
this if we take the inverse of
 and multiply both sides of the equation by
it:
and multiply both sides of the equation by
it:
 (17)
(17)
This follows, because A-1A = I and IA = A.
Thus, the
OLS solution for  is
is
 which should look familiar.
which should look familiar.